반응형
근 4개월에 걸쳐 틈틈이 만들고 땜질하고 프로그래밍한 결과로,
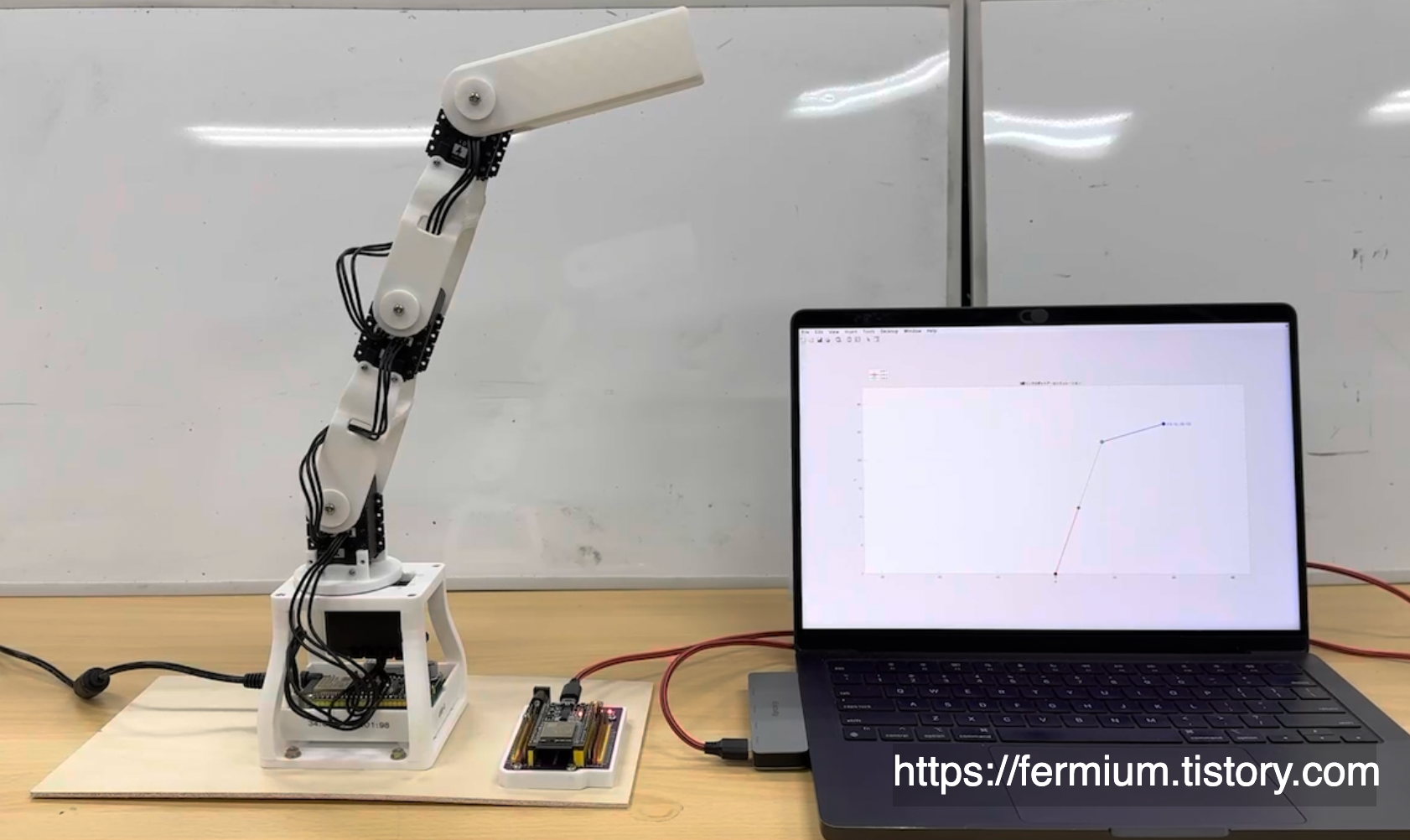
드디어 시스템이 완성되었다.
학생들 Matlab으로 공부하게 해 보려고
나도 급하게 이것저것 공부했는데,
결국에는 해냈다.
그래프 위를 클릭하면,
그 점 좌표를 이용하여 로봇 팔 자세를 제어하는 시스템이다.
컨트롤 신호는 ESP32를 이용하여서,
ESP-NOW를 이용하여 로봇팔에 전송된다.
이제 제일 어려운 과제가 남았는데,
이걸로 어떻게 가르칠지 생각해야 된다.
(참고)
교육용 로봇 팔 시스템의 제작
지난번에 기판을 신나게 만들어서, 이제는 교육용 시스템을 만들려고 머리를 싸매고 있다. 모터 제어를 위한 기판 만들기다이나믹셀 AX-12 모터가 은근히 쓰기 편하고 좋아서 수업 관련 자
fermium.tistory.com
반응형