반응형
매트랩으로 로봇 팔 컨트롤 by Inverse Kinematics
근 4개월에 걸쳐 틈틈이 만들고 땜질하고 프로그래밍한 결과로, 드디어 시스템이 완성되었다. 학생들 Matlab으로 공부하게 해 보려고 나도 급하게 이것저것 공부했는데, 결국에는 해냈다.
fermium.tistory.com
전에부터 교육용으로 로봇 팔을 만들어 보고 있었는데,
정보를 검색하다 보니 SO-101 로봇팔이 오픈소스로 풀려 있다는 것을 발견하고 만들어 보기로 했다.
https://huggingface.co/docs/lerobot/so101?calibrate_leader=API+example#calibration-video
SO-101
huggingface.co
관련 자료들을 다운로드하고,
3D 프린터로 부품들을 인쇄한다.

인쇄 뒤에는 서포트 재료들을 하나하나 다 떼어 내준다.
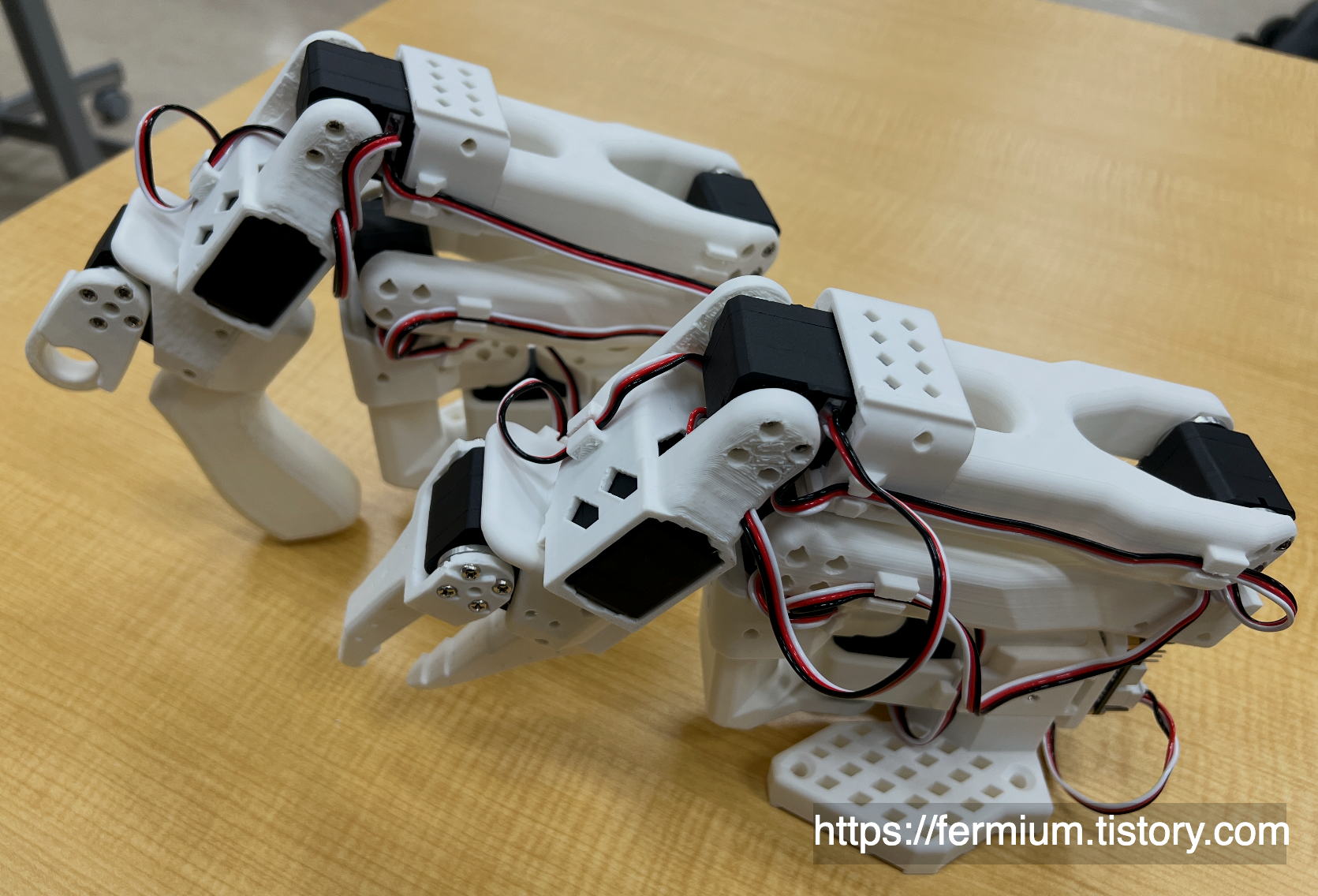
리더암과 팔로워암을 조립해 주면 로봇 팔 세트 완성.
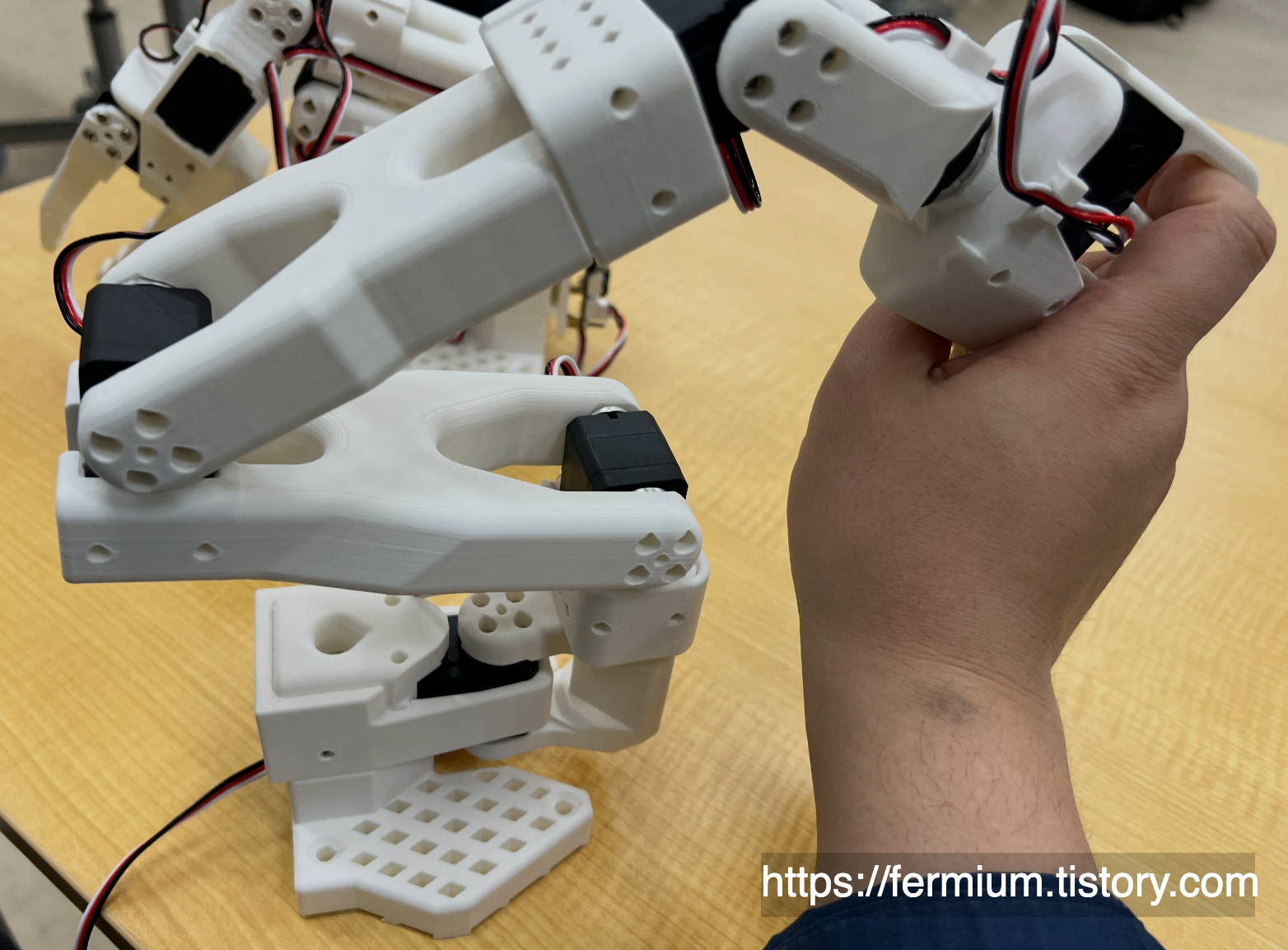
리더암을 이런 식으로 컨트롤해 주면,
팔로워 암이 똑같은 동작을 할 수 있게 된다.
이제부터 소스코드 등을 개발해 볼까 싶다.
석사과정 시작해서 박사과정 끝나고 홀로서기할 때까지가 정말 지옥이었는데,
어느 정도 자리를 잡으니까 내가 좋아하는 연구를 할 수 있다는 게 좋네.
반응형